EÖTVÖS LORÁND TUDOMÁNYEGYETEM
TERMÉSZETTUDOMÁNYI KAR
A kerékpár fékezésének fizikája
SZAKDOLGOZAT
Készítette: Németh Ferenc
Témavezető: Juhász András
1997.
I. RÉSZ: FÉKEZÉS EGYENES ÚTON
A mindennapi élet tömérdek vizsgálni való témát ad a fizika számára. Ezek közül kitűnnek a mozgással kapcsolatos problémák, mivel szemléletességük valósággal vonzza a kérdéseket. Dolgozatunkban a kerékpár mozgásának egynémely gyakorlati oldalával foglalkozunk, konkrétan: megpróbáljuk matematikailag leírni, hogy mi történik a kerékpárral fékezés és kanyarodás közben. Mint a legtöbb modell, a mostani leírás sem tökéletes – a dolgozat végén külön ki kell térnünk azokra a jelenségekre, amelyekről az általunk felhasznált leírás eredendő hiányosságai miatt nem ad számot. Előrebocsátjuk, hogy a jelen írás már műfajánál fogva sem vállalkozhat a kerékpározás fizikájának összefoglalására, s még kevésbé a bicikli tervezésekor előálló kérdések megválaszolására. Ezekkel kapcsolatban az illetékességet át kell engednünk a gyártó cégek külön e célra kiképzett szakembereinek.
Szükségesnek látszik, hogy elöljáróban röviden felvázoljuk a dolgozat céljait és programját. A merev test modelljének alkalmazásával megvizsgáljuk, hogy a (közvetlenül szabályozható) fékerők hogyan befolyásolják a kényszererőket: a talajon jelentkező tapadási és nyomóerőket, valamint a váz és a kerekek között ébredő erőket. Ezután a tapadó súrlódás S < μN erőtörvénye segítségével rátérünk a megcsúszás leírására. A fékezés mellé a második részben beillesztjük a kanyarodást is, végül a Függelékben a gyakorlati vonatkozásokkal és a modell használhatóságával foglalkozunk. Ide kerülnek a hosszabb levezetések is.
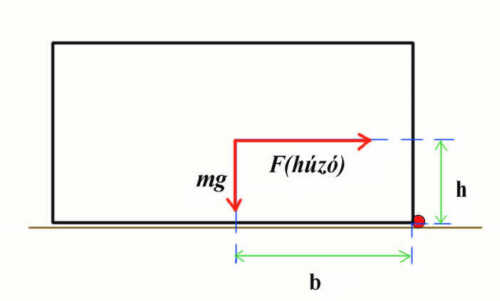
Kiindulásul feltételezzük, hogy fékezés közben a kerékpár és a kerékpáros egy tömegpontba sűríthető. Ezzel gyakorlatilag kizárjuk a fékerő hirtelen változásait, amikor a kerékpáros teste előrelódul, illetve hátradől.
Az egyszerűség kedvéért helyezzük a fékeket a tengelyek fölé. A tárgyalás így könnyebb lesz, másrészt az erőösszefüggések matematikai alakjának ismeretében bebizonyítható, hogy ez az egyszerűsítés nem változtatja meg a nyomóerők függését a fékezéstől. A szerző elvégezte a bizonyítást, de a dolgozatot nem akarta ezzel is nyújtani.
A koordináta-rendszer mozogjon együtt a kerékpárral; origóját rögzítsük a két kerékagy által megadott szakasz felezőpontjába (X). Az x tengely mutasson balra, amely ez esetben a kerékpár mozgásiránya is; az y tengely legyen erre merőleges, és mutasson fölfelé. (A lejtőn való mozgás vizsgálatakor az x tengely a haladás irányába fog mutatni, az y tengely rá merőlegesen "fölfelé".) A pozitív forgásirány legyen az óramutató járásával megegyező.
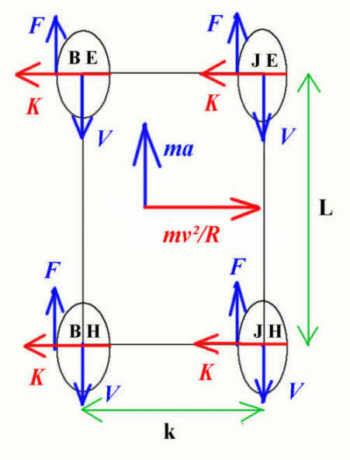
A tömegközéppont magassága legyen h, feküdjön az X pont mögött d-vel. Legyen a kerekek sugara r, a kerékagyak közti távolság l (az ábrán a jobb láthatóság kedvéért L). Jelölje a kerékpár váza és az utas együttes tömegét m, a kerekek tömegét me, mh. Mivel együttmozgó rendszerben dolgozunk, a tömegközéppontban fel kell vennünk egy ma tehetetlenségi erőt, amely mintegy előrefelé lódítja a kerékpárt. A kerekekre is be kell vezetni me/ha inerciaerőket; ezeket nem tüntettük fel az ábrán.

Az ábrán helyhiány miatt nem jelöltük a villák végén ébredő erő-ellenerő pár függőleges komponensét sem, de ez könnyen kifejezhető a többi erővel. Öt egyenletet írunk fel:
Az egész bicikli és az utas y szerinti erőegyensúlyáról (nyomóerők a kerekek alatt; nehézségi erő),
A váz és a kerékpáros által alkotott rendszer (az úgynevezett "redukált bicikli") x szerinti erőegyensúlyáról (a tengelyeknél ébredő vízszintes erőkomponensek; az abroncsok által a fékpofákra gyakorolt erők; a lassulásból származó tehetetlenségi erő),
A kerekek kerületi gyorsulásáról (tapadó súrlódási erő a talajon; fékerő) – a jelölés: Θe/h = ke/h me/h r2, ahol 0 < ke, kh < 1
A kerekek x szerinti egyensúlyáról (tapadó súrlódási erő; fékerő; tehetetlenségi erő; a villa által a tengelyre kifejtett vízszintes erő),
A "redukált biciklire" ható erők origó körüli forgatónyomatékainak egyensúlyáról (a tengelyeknél ébredő függőleges erők, amelyek voltaképp a kerekek súlyával csökkentett, kerék alatti nyomóerők; a fékpofák által kifejtett erők; tehetetlenségi erő; nehézségi erő).
Látható, hogy a vázban és az abroncsokban-küllőkben ébredő erőket teljesen figyelmen kívül hagytuk, holott ezek tekintélyesek lehetnek, olyannyira, hogy a fém lassú fáradását és törését is okozhatják. Részben az ilyen jellegű problémák késztetik a gyártókat arra, hogy technikai újításokat vezessenek be. Mi azonban elsősorban a pillanatnyi erőeloszlásból igyekszünk következtetéseket levonni, így a hosszú távú fáradási folyamatot nem érintjük.
A következő levezetés, bár elég hosszú, a főrészbe kívánkozik. Követése során lényegében a modell szigorúságáról győződhetünk meg. Dr. NAGY Sándor ([1], 111-113. o.) ugyanilyen bizonyításra támaszkodva, de azt mellőzve közli a bukás és a farolás határlassulásait. Eredményeink többé-kevésbé ismertek lesznek minden gyakorló kerékpáros számára – itt most egyrészt a kvantitatív jellemzés a célunk, másrészt a jelenségek mögötti indokok tudatosítása, kiemelése.
|
(1) (m+me+mh)g = Ne + Nh
(2) ma = Ve + Vh – Fe – Fh
(3a) kemear = (Fe–Se)r → Se = Fe – kemea
(3b) khmhar = (Fh–Sh)r → Sh = Fh – khmha
(4a) mea = Se + Fe – Ve
(4b) mha = Sh + Fh – Vh
(5) – ma(h–r) + [(Ne–meag) – (Nh–mhag)]·l/2 – (Fe+Fh)r + mgd
|
Az egyenletrendszer megoldásának fő iránya az, hogy kiderítsük a nyomóerők függését a fékezéstől. Ezután sor kerülhet a megcsúszás vizsgálatára.
(4) → Ve = Se – mea, illetve Vh = Sh – mha
(2) → ma = Se + Sh – (me+mh)a
(3) → ma = Fe + Fh – [me(1+ke) + mh(1+kh)]a, és ebből
| (6) |
|
| a = |
|
| Fe + Fh |
|
| m + me(1+ke) + mh(1+kh) |
|
|
(5) → –ma(h–r) + (Ne–Nh)·l/2 + (mh–me)·gl/2 – (Fe+Fh)r + mgd = 0
Ebből
| Ne–Nh = (Fe+Fh) |
( |
| m |
|
| m + me(1+ke) + mh(1+kh) |
|
· |
|
+ |
| me(1+ke) + mh(1+kh) |
|
| m + me(1+ke) + mh(1+kh) |
|
· |
|
) |
+ (me–mh)g – 2mg |
|
| Az |
| m |
|
| m + me(1+ke) + mh(1+kh) |
|
törtet A-val jelölve: |
| Ne–Nh = (Fe+Fh) |
( |
A |
|
+ (1-A) |
|
) |
+ (me–mh)g – 2mg |
|
Összevetve (1)-gyel, a következő képletek adódnak a nyomóerőkre:
| Ne = (Fe+Fh) |
( |
A |
|
+ (1–A) |
| ) |
+ |
|
( |
1– |
|
) |
+ me g |
|
és
| Nh = –(Fe+Fh) |
( |
A |
|
+ (1–A) |
| ) |
+ |
|
( |
1+ |
|
) |
+ mh g |
|
Látható, hogy 1-A igen kicsi. Bevezethetjük a h* = Ah + (1-A)r korrigált magasságot, és az
|
|
|
( |
1– |
|
) |
= |
|
( |
1– |
|
) |
+ me g |
|
|
|
( |
1+ |
|
) |
= |
|
( |
1+ |
|
) |
+ mh g |
egyenletrendszerrel definiált korrigált tömeget és hátraülést (m*, d*).
Az egyenleteket összeadva m* = m+me+mh, különbségüket véve pedig
adódik. A csillagos mennyiségekre áttérve és a csillagokat elhagyva a nyomóerők képletei új alakban:
| Ne = (Fe+Fh) |
|
+ mg
|
( |
|
– |
|
) |
|
és |
|
Nh = –(Fe+Fh) |
|
+ mg
|
( |
|
+ |
|
) |
Ha b = l/2 + d és c = l/2 – d, akkor
Az első érdekes következmény, hogy (stabil fékezés esetén) a kerekek alatti nyomóerők csak a fékerők összegétől függnek, és nem az első vagy a hátsó fékerőtől külön-külön. Másodsorban pedig arra érdemes figyelni, hogy a fékezés hatására a súly egyre inkább áttevődik a hátsó kerékről az elsőre. Már itt kezd körvonalazódni az a tapasztalati tény, hogy az első fékkel hatásosabban lehet lassítani a biciklit, mint a hátsóval.
A továbbiakban számszerűleg is meghatározzuk ezt a viszonyt a két fék között azáltal, hogy kiszámoljuk, mekkora lassulás esetén fog megcsúszni a kerékpár, ha csak az első, illetve csak a hátsó féket húzzuk.
A hátsó kerék megcsúszását az Fe = 0, Nh = Fh/μ egyenletek jellemzik; ezeket (7b)-be helyettesítve:
|
|
|
és mivel ez az egyetlen erő, ami lassulást okoz: |
|
|
A szemléletesség kedvéért ebbe az eredménybe behelyettesíthetjük egy képzeletbeli átlagkerékpár geometriai adatait (l = 1,5; b = 0,8; c = 0,7; h = 1,2), amely igen jól tapadó úton halad (μ = 0,9). Így 0,3g maximális lassulás jön ki, ami a pontmodell által megengedett μg-hez képest elég kicsi. Ezért jó okunk van megvizsgálni a kizárólag első fékkel elérhető maximális lassulást. A meghatározó egyenletek a megcsúszás pillanatában: Fh = 0; Ne = Fe /μ. Ezeket (7a)-ba írva:
Már a képletből is látszik, hogy az első fék hatékonyabb, mint a hátsó. Viszont ha behelyettesítjük a fenti "tipikus" adatokat, akkor 1,5g maximális lassulás adódik, amit a pontmodell nem enged meg! Ennek a hibás eredménynek az az oka, hogy eleddig nem követeltük meg a nyomóerőktől, hogy pozitívak legyenek, pedig ez fizikai tartalmukból (nyomó erők) következik. Valóban, (7b)-ből ilyen körülmények között a hátsó nyomóerő negatívnak adódik, ami azt jelenti, hogy a kerékpár – az 1,5g lassulás elérése helyett – felbukik.
Szinte minden valamirevaló biciklista átélte már a bukás "felemelő" érzését. Az egész egy pillanat műve: sikolt a fék, aztán hanyatt a talajra zuhanunk, ölünkben a bringával. A kerékpárosok nagy családjában se szeri, se száma a fogadatlan prókátoroknak, akik saját, soha ki nem próbált elméleteikkel vigasztalják pórul járt társaikat. John FORESTER [2] említ néhány ilyen babonát: "Ha csak az első féket húzod, biztos a bukás," vagy "A bukás veszélye nem fenyeget, ha a hátsóval is fékezel." Helyesbítésül hozzáfűzi:
Valójában a bukást kizárólag az első fékerő szabja meg, függetlenül a hátsó fékkel kifejtett erőtől (ha egyáltalán húzzuk). Az összes többi meghatározó mennyiség (úgymint a kerékpár geometriája és súlyelosztása) nemigen szabályozható menet közben. Ha a lassulás a bukfenchez szükséges kritikus értékhez közelít, a hátsó kereket terhelő súly nullához tart. Ilyenformán vele nem is lehet lassulást elérni: ha nem húzzuk a hátsó féket, szabadon gurul; ha igen, akkor gyakorlatilag zérus fékerő hatására megfarol. A közönséges biciklik 0,67g-nél erősebb fékezés esetén felbuknak.
Vajon honnan jött ki ez az érték? Egyenleteink segítségével ennek is utánajárhatunk. A bukás kezdetén az első kerék nem csúszik meg, és rajta van az egész súly: Nh = 0; Fh = 0 és mg = Ne ≥ Fe /μ. Ezeket (7a)-ba helyettesítve:
| mg |
( |
1– |
|
) |
= Fe |
|
, amiből Fe = mg |
|
A meg nem csúszás feltétele eszerint a következő:
| Vagyis bukás akkor következhet be, ha |
| , és a kívánt lassulás: |
|
Ez éppen 0,67g. J. FORESTER megállapítását tehát igazoltuk, azzal a kiegészítő feltétellel, hogy "ha az út és a kerék közti tapadási együttható elég nagy". A szám szerinti egyezésnek az azonos gondolatmeneteken kívül az az oka, hogy Amerikában ugyanazt a kerékpárt tekintik tipikus felépítésűnek, amit mi.
Eredményünk helyére teszi az iménti 1,5g fantomlassulást is, mert ha μ > b/h, akkor a bukás nélkül elérhető gb/h maximális lassulás kisebb μg-nél. Ez egyszerűen szemléltethető azzal az egyszerűsítő feltevéssel, hogy a bicikli egy, az eddig használt geometriai adatokkal leírható téglatest (a vastagsága nem lényeges), amelyet tömegközéppontján áthaladó kötéllel próbálunk l-lel párhuzamosan elhúzni. Azt, hogy a bicikli első kereke ne csússzon meg, azzal a megoldással érhetjük el e modellben, hogy a húzásirányba eső oldallap alsó sarkait egy tengellyel a földhöz rögzítjük.
|
A forgatónyomatékok eredője 0, azaz
|
Kerékpármodellünk tulajdonképpen nem több, mint ez a hasáb, ennélfogva eddigi eredményeink autóra is alkalmazhatók. A legfontosabb eltérés kvantitatív jellegű: a gépkocsi geometriája (b,c,h) más, így ugyanazon az úton nagyobb lassulás esetén fog megcsúszni, mint a kerékpár. Bukás gyakorlatilag nem fordul elő, ugyanis irreálisan nagy tapadási együttható volna szükséges hozzá. A krimikben szereplő, hatásosan csikorgó fékekkel megálló rendőrautókon mégis meg lehet figyelni ennek a hatásnak a kicsinyített mását: az előrelódító tehetetlenségi erő hatására az autó eleje a földhöz lapul, míg hátulját a megkönnyebbült rugók feljebb nyomják. Mielőtt a felügyelő kiszállna, a lassulási állapot véget ér, és a rugók visszatérnek az alaphelyzetbe. Ezt a "nyekkenést" a kocsi belsejében ülők is észlelik.
Két fék együttes használata
A korábbiakból kiderült, hogy az első fék sokkal hatékonyabb, mint a hátsó, és nem azért, mintha gyárilag erősebb volna, hanem mert lassuláskor a nyomóerők eloszlása eltolódik, úgyhogy a hátsó kerékre kifejthető fékerő maximuma csökken, az első kerék esetében pedig nő. De továbbra is előttünk áll az a kérdés, hogy van-e értelme a két kézzel való fékezésnek. Vajon nem elég-e egyszerűen csak az első féket húzni, mivel az az "erősebb"?
A továbbiakban kimutatjuk, hogy csúszós talajon igenis előnyösebb, ha a két féket egyszerre használjuk. Ehhez a (7ab) egyenleteket az első, illetve hátsó kerék biztonságos fékezését leíró
|
(8ab) |
Fe ≤ μNe |
és |
Fh ≤ μNh |
képletekkel vetjük össze.
Tekintsük először az első kerék biztonságos fékezését (7a) és (8a) kombinálásával:
|
≤ Ne = mg |
|
+ (Fe+Fh) |
|
, ebből (9a) |
|
A szemléletesség kedvéért érdemes a megengedett fékkombinációkat (Fe;Fh) diagramon ábrázolni. Az eredmény: μ paraméterű egyenessereg, amelynek tagjai fölött vannak az első kereket biztonságosan fékező (Fe;Fh) kombinációk. Az ilyen egyeneseket a továbbiakban csúszásvonalaknak nevezzük.

|
Már ebből a diagramból is levonható néhány következtetés: először is az, hogy a hátsó fék húzása bizonyos értelemben növeli a rendelkezésre álló első fékerőt, hiszen az egyenesek jobbra dőlnek.
Felsejlik a két fék együttes használatának értelme. A grafikon azonban csak szükséges feltételt ad a biztonságos fékezéshez, mivel nem veszi figyelembe a hátsó kereket, amely hasonló tárgyalást kíván.
|
(7b) és (8b) összevetésével látható a hátsó kerékre veszélytelen fékkombinációkról, hogy
|
≤ Nh = mg |
|
– (Fe+Fh) |
|
, ebből (9b) |
|
Ez ijesztőnek tűnhet, mert a konstanstag is függ μ-től. De ha behelyettesítünk egy alkalmas értéket: Fe = mgb/h, akkor minden μ-re Fh = 0 adódik. Vagyis ez az egyenessereg is egy ponton megy át. Adott μ esetén a hozzá tartozó egyenes alatt lesznek a hátsó kerékre megengedett (Fe;Fh) párok.

|
A bukás nagyon meggyőzően látszik az ábrán: a megengedett fékerőtartomány jobbra haladva "elfogy," mert a hátsó nyomóerő nullává válik.
Megjegyzendő, hogy a μ → ∞ határesetben az egyenesek meredeksége –1-hez tart, tehát a függőleges tengelymetszet által szolgáltatott elméleti maximális hátsó fékerő soha nem lépheti túl a (tapadós talajon) bukást okozó első fékerőt.
|
Optimális fékezés
Az eddigi eredményekhez néhány összefoglaló megjegyzést fűzhetünk.
A két fék együttes használatát feltételezve megmutattuk, hogy a biztonságos fékerő-kombinációk a pozitív síknegyednek olyan részét foglalják el, amelyet paraméteres egyenesseregek egyazon tapadási tényezőhöz tartozó egyenespárjai határolnak. Az ábra néhány ilyen tartományt mutat. Róla leolvasható, hogy a veszélytelen fékezési kombinációk halmaza csúszós úton négyszög, illetve nagy μ-k esetén háromszög.

A nagyjából mérethű grafikonról az eddigiek mellett az is látszik, hogy az első fék sokkal nagyobb erőt tud biztonságosan kifejteni, mint a hátsó. Kivétel ezalól a nagyon csúszós út, amelyen megközelítőleg egyenlők az első és a hátsó maximális fékerők. Felidézve, hogy a lassulást a két fékerő összege okozza, a maximális biztonságos lassulást úgy kereshetjük meg az ábrán, hogy –1 meredekségű egyeneseket húzunk rajta (és egyben a pozitív síknegyeden) keresztül. Ezek mentén Fe+Fh állandó, mégpedig az illető egyenes és az origó távolságának számszorosa.
A μ paraméter függvényében előálló tartománysereg egy választott tagjának a legjobban fékező pontja az, amelyet belőle a –1 meredekségű egyenesek közül az origótól legtávolibb metsz ki. A meredekségekre vonatkozó egyszerű meggondolásokkal azt kapjuk, hogy az optimális fékkombinációk egyrészt a csúszásvonalak metszéspontjai (kis μ-kre, ahol tudniillik ez a pozitív síknegyedbe esik), másrészt az mgb/h bukfencpont. (Ez μ > b/h esetére igaz, mert ekkor a fenti metszéspont negatív hátsó fékerőhöz tartozik, és az Fh = μNh formális egyenlet miatt a hátsó nyomóerő is negatív, ami pedig a bukás miatt fizikailag értelmetlen.)
Csúszósabb utakra tehát egyértelműen bebizonyosodott, hogy érdemes mindkét féket húzni, hiszen az Fe tengelyről lelépve nagyobb lassulást tudtunk elérni. Az ábra igazolja azt a korábbi sejtésünket is, hogy μ < b/h esetén nem fordul elő bukás – ekkor ugyanis a kritikus lassulás erőltetésekor az első kerék fog megcsúszni. Tapadós úton pedig jól látszik a lassulás növekedtével egyre kisebbre olvadó hátsó felhasználható fékerő – ez mutatja, hogy már alig van súly a hátsó keréken.
Ide kívánkozik, hogy a J. FORESTER említette babonák egyike egy lényeges módosítással igazzá tehető: "A hátsó fék egyenletes, enyhe húzásával és szüntelen odafigyeléssel a bukás elkerülhető, ugyanis a közelgő bukást a hátsó kerék (önmagában veszélytelen) leblokkolása hallhatóan jelzi." Azaz a hátsó fék nem csodaszer, hanem vészjelző, amely önmaga nem hárítja el a katasztrófát, csak figyelmeztet a közelségére. Mindazonáltal igen óvatosan kell szabályozni az első fékerőt, mert a bukás valóban "egy pillanat műve". Mellesleg a jelenséget FORESTER is ismeri; cikkében a lejtőn való fékezés technikájának tapasztalati elsajátításához ajánlja. [2] Dr. NAGY Sándor is megemlíti. ([1], 119. o.)
A téglaszerű kerékpármodell csúszós talajon felveszi a versenyt a pontmodellel
Hátravan még annak bizonyítása, hogy olyan csúszós úton, amelyen a bukás elvileg nem lehetséges, a bicikli baleset nélkül elérheti a pontmodell adta μg maximális lassulást.
(Pontmodellnek számít pl. egy kis labda belsejében utazó, azt belülről fékező egér.) |

|
A bizonyításhoz a csúszásvonalak egyenletét használjuk. A metszéspont koordinátáinak összege μmg kell, hogy legyen. A c = l – b helyettesítéssel felírva a (9ab)-vel kétféleképpen kifejezett hátsó kritikus fékerőt:
| Fh = |
|
Fe |
( |
|
–1 |
) |
+ mg |
|
= – Fe |
|
+ mg |
|
|
| |
|
·(1+l/μh) |
| Fe |
[( |
|
) |
2 |
– 1 |
] |
+ mg |
|
|
( |
1+ |
|
) |
= –Fe + mg |
|
| Fe |
( |
|
) |
2 |
= mg |
|
+ |
|
( |
mg |
|
– mg |
|
)( |
1+ |
|
) |
= |
| = mg |
|
+ mg |
|
– mg |
|
= mg |
|
( |
1+ |
|
) |
Átosztva megkapjuk a metszéspont első koordinátáját:
Ezt pl. (9a)-ba visszahelyettesítve:
| Fopt, e = Fopt, h |
( |
|
–1 |
) |
+ mg |
|
= |
| A számolást mellőzve: (10b) |
|
Ez a metszéspont második koordinátája. A bizonyítandó állítás a két koordináta össszeadásával adódik.
Ezek a látszólag elvont képletek adják a leghasznosabb tanácsot gyakorló kerékpárosoknak. Nem kell mást tenni, csak megmérni-megbecsülni a (10ab) jobb oldalán szereplő fizikai és geometriai adatokat, elvégezni a behelyettesítéseket, majd a fékszerkezetre jellemző veszteségi számmal osztani az eredményeket, és máris megvannak az optimális fékerők.
Természetesen a szerző is tudja, hogy mindez csak elmélet, és lesznek, akik elnéző mosollyal fogadják, mondván: "Gyakorlat teszi a mestert." Kár, hogy annyi "mester" végzi kórházban emiatt. Mások pedig az önhibájukból bekövetkezett bukásért perelik a gyártót – hiába [2].
Megjegyzések
A szürke elmélet (a μ paraméterű görbéből μ kiküszöbölése, főtengely-transzformáció, deriválás) segítségével megállapítható, hogy az optimális fékkombinációk halmaza (ahol a tapadási együttható befutja a [0;b/h] intervallumot) ferde (pontosabban: –135°-ban dőlő tengelyű) parabolának a pozitív síknegyedbe eső része. A parabola tengelye csak akkor megy keresztül az origón, ha a tömegközéppont félúton van a két tengely közt (azaz d = 0).
Az Fh szerinti maximum b/2h nagyságú tapadási tényezőhöz tartozik, értéke mgb2/4hl, azaz az átlagbicikli adataival 0,09mg. Szemléletes jelentése: ha valaki optimálisan fékez, akkor ennél erősebben sosem kell húznia a hátsót. Erről bővebben lásd a Függeléket.
Bizonyítás nélkül már közöltük azt a – spekulatív úton is belátható – eredményt, hogy a fékeknek a kerékhez viszonyított helyzete semmit sem változtat a nyomóerők (7ab) képletén. Azaz ilyen belső változtatással sem lehet jobb eredményt kifacsarni a kerékpárból: ugyanúgy meg fog csúszni, fel fog bukni, mint a hagyományos típus.
A modell egyszerűsége ellenére meglepően sok irányban fejleszthető tovább. Le tudja írni például a lejtőn, ill. emelkedőn való fékezést. Az erők megfelelő átértelmezésével ugyanis a probléma begyömöszölhető az eddigi egyenletrendszerbe.
Jelöljük a lejtés szögét θ-val. Rögzítsük a koordináta-rendszer x tengelyét a haladás irányához, y tengelyét a talaj síkjára merőlegesen! Ekkor a talajirányú tehetetlenségi erőhöz hozzáadódik a hasonlóan előre mutató mgsinθ, és a függőleges mg átmegy az általánosabb mgcosθ-ba. A nyomóerők (7ab) képletei a következő alakot öltik:
| (7a)' |
| Ne = (Fe+Fh) |
|
+ |
|
[ |
m |
( |
|
– |
|
|
) |
+ me |
] |
•gcosθ + Qmgsinθ |
|
| (7b)' |
| Nh = –(Fe+Fh) |
|
+ |
|
[ |
m |
( |
|
+ |
|
|
) |
+ mh |
] |
•gcosθ – Qmgsinθ, |
|
| ahol A ugyanaz, mint a kezdeti levezetésben, és Q = |
|
| ke me + kh mh |
|
|
| 1 + (1+ke)me + (1+kh)mh |
|
≈ 0,01 |
Az utolsó tag elhanyagolható, így a g' := gcosθ, a' := a + gsinθ új mennyiségek bevezetésével a (7ab) előtti egyenletekhez jutunk. Ennek a transzformációnak szemléletes jelentése is van: ha a talajhoz képesti a lassulás zérus (például a kerékpár áll, vagy állandó sebességgel gurul), akkor is történhet baleset. Tapadós talajon ugyanis amax = g'b/h, azaz a + gsinθ < gcosθ·b/h, ahonnan a = 0 miatt tgθ < b/h lesz annak feltétele, hogy a biciklista ne bukjon fel egyenletes haladáskor. (Normális kerékpárra kb. 33,7°-nál lankásabb lejtő). A csúszós úton való egyenletes haladás pedig akkor biztonságos, ha a' < μg', azaz a = 0 miatt gsinθ < μgcosθ, vagyis tgθ < μ. Ezek a képletek a tömegpont mechanikájából már ismerősek.
A modellbe még a légellenállás (Fközeg = kv2) is belepréselhető, ha feltételezzük, hogy ez az erő a tömegközéppontban támad. Felületi erőről lévén szó, ez szigorúan véve nem igaz, de közelítésnek bizonyára alkalmas. Az eddigi átértelmezést alapul véve elég lesz kimutatni, hogy ha adva van g, θ és k, akkor egyértelműen található g' és θ' úgy, hogy g'cosθ' = gcosθ és g'sinθ' = gsinθ – kv2/m. Ezzel a helyettesítéssel ugyanis a légellenállás beolvasztható a lejtőbe és g-be. A dolog voltaképpen azt jelenti, hogy légkörrel rendelkező bolygónk egy kies lejtőjéről a kerékpárost egy atmoszféra nélküli égitestre helyezzük át. A két egyenlet hányadosa:
vagyis a földi légellenállás olyan, mintha lankásabb lejtőn gurulnánk egy légkör nélküli bolygón. Behelyettesítéssel megkapható az ottani nehézségi gyorsulás is: g' = gcosθ/cosθ' Ellenőrzésül tekintsük azt a földi kerékpárost, akit a légellenállás már nem enged tovább gyorsulni: mgsinθ = kv2, "átköltözéskor" tgθ' = 0, azaz légellenállás nélkül, vízszintes talajon gurul – és mivel más disszipatív erőt nem tárgyaltunk, tényleg egyenletesen halad.
Megjegyzendő, hogy a légellenállás és a lejtő okozta gyorsulási tagok (a fékezési lassulástól eltérően) nem szólnak bele a forgatónyomatéki egyenletbe. Ez úgy indokolható, hogy bár mindannyian hozzájárulnak az ma inerciaerőhöz, egyedül a fékerők azok, amelyek nem a tömegközéppontban, hanem a fékpofák magasságában forgatják a vázat. A légellenállás és az emelkedőre való felgurulás ilyenformán teljesen veszélytelen formája a fékezésnek: amíg a lassulás tart, addig egyáltalán nem tolják el a nyomóerők eloszlását, és így nem okozzák a kerekek leblokkolását. Ismert kép: fékezőernyőkkel megálló gépcsodák a gyorsulási autóversenyeken – innen is látszik, hogy elvileg ez a "féktípus" a legtisztább. Sajnos az általunk tárgyalt sebességtartományban elég gyengén fog, és nem is szabályozható finoman.
Néhány szó idekívánkozik a balesetekről. LÁSZLÓ Gergely szerint a legtöbb esés abból adódik, hogy a kerékpáros nem méri fel helyesen a kanyart, és kisodródik – mindazonáltal előfordulnak balesetek egyenes úton is. Itt a közismert felbukfencezésen kívül (amelynek félelmetes híre van) az első kerék megcsúszása számít veszélyesnek. Hasonlóan az autóhoz, a kerékpár is irányíthatatlanná válik ilyenkor, és oldalra kicsúszik utasa alól. Befagyott tó jegén ezt ellenőrizni lehet. Ezzel szemben a hátsó kerék megfarolása szinte egyáltalán nem veszélyes – olyannyira, hogy kanyarpótlónak is használható. Dr. NAGY Sándor ezt írja: ([1], 119. o.)
Hirtelen kanyarodásra vagy gyors megállásra a kerékpár szándékos faroltatása is felhasználható. A manőver lényege: az ember félrehúzza a kormányt, s egyidejűleg gorombán megrántja a hátsó féket. Mivel az elfordított első kerék kitér a hátsó kerék útjából, a kerékpár csúszó hátsó része akadálytalanul lendülhet tovább: a kerékpár kifarol. Ha kanyarodni akartunk, csak ki kell engedni a megfelelő pillanatban a féket, s az engedelmes hátsó kerék máris követi a kanyarra állított első kereket.
Egy érdekesség: a salakmotorosok e technika "egyenletes" változatával veszik be a kanyart.
II. RÉSZ: FÉKEZÉS KANYARBAN
A kanyarban, mint azt mindenki tudja, a kerékpár "bedől," és ami a legérdekesebb: ezt "magától" teszi, nekünk nem kell semmit csinálni. Ez a tapasztalat csalóka: nem a kormányzással kanyarodunk, hanem súlypontáthelyezéssel, dőléssel; csakhogy ezt a tényt utoljára akkor tudatosítja az ember, amikor biciklizni tanul, és később elfelejti. A kormányra csak azért van szükség, hogy az instabil dőlési egyensúlyt apró kiigazító mozdulatokkal megtartsuk, és hogy a biciklit a dőlés által biztosított oldalerő által megszabott körpályára ráállítsuk, és így az esést megelőzzük. Azaz nem a dőlés követi a kormányzást, hanem fordítva. ([1], 99. o.)
Ezen felismerés birtokában a továbbiakban a kormányt "megmerevítjük," azaz feltételezzük, hogy a kerékpáros nem imbolyog, és hogy a kerekek automatikusan a dőlés által vezényelt körpályára állnak be. Ezután nagy görbületi sugarú kanyarokra szorítkozunk, azaz a pályán futó bicikli kerekét elfordítatlannak képzeljük. A kanyarodásra ilyenformán csak a bedőlés és a kényszererőket igénybe vevő oldalerőszükséglet fog utalni. Szintén elhanyagoljuk a pályairányú lassulásból és a pályagörbület hely szerinti változásából származó felülnézeti szöggyorsulást – ennek a döntésnek a következményeit a záró megjegyzésekben taglaljuk.
Az erőket az egyenes pályához hasonlóan ábráról olvassuk le. A dőlés miatt azonban az erőkarok a dőlésszög szögfüggvényeivel kifejezhető módon változnak.

Oldalnézet
|

Felülnézet |

Elölnézet |
| (1) Θβ = (Fe+Fh)rsinφ + (mgsinθ–kv2+ma)(h–r)sinφ – |
|
|
d + (Kh–Ke) |
|
| (2) (Fe+Fh)rcosφ + (mgsinθ–kv2+ma)(h–r)cosφ – mgdcosθ + (Nh–Ne) |
|
= 0 |
(4) mgsinθ – kv2 + ma = Fe + Fh
(6) Ne + Nh = mgcosθ
|
Kerékpárra a szöggyorsulás és a tehetetlenségi nyomaték szorzata általában kicsi, így a továbbiakban nullának tekintjük. Azaz eleve kizárjuk a hirtelen mozdulatokat. A levezetések teljesen hasonlóak a kanyarodás nélküli esethez. Megjegyzendő, hogy a (3) egyenletet még nem használjuk fel, így, mint később kiderül, képleteink az autó (idealizált változatának) kanyarodását-fékezését is leírják. A kényszererők a következő módon függnek a fékerőösszegtől:
| (7ab)
Ne = mgcosθ |
|
+ (Fe+Fh)cosφ |
|
Nh = mgcosθ |
|
– (Fe+Fh)cosφ |
|
| (8ab) Ke = |
|
|
· |
|
+ (Fe+Fh)sinφ |
|
Kh = |
|
|
· |
|
– (Fe+Fh)sinφ |
|
|
Programunk továbbra is a megcsúszás és a bukás vizsgálata. Ehhez a kényszererőket (az oldalirányú lejtést figyelembevéve) transzformálnunk kell, hogy a lejtő síkjára merőleges nyomókomponenst és a síkban ébredő tartóerő-szükségletet előállíthassuk. Ha η-val jelöljük az oldallejtés előjeles szögét (amely definíció szerint akkor pozitív, ha az útirányhoz képest balra is lejt a hegyoldal), akkor a nyomó- és a keresztirányú erők új képletei:

|
| (9) |
N' = Ncosη + Ksinη K' = – Nsinη + Kcosη |
|
| Bevezetve az |
α = sinφ |
|
, γ = cosφ |
|
mértékegység nélküli nélküli szorzókat, |
|
továbbá az erő dimenziójú
|
|
állandókat, |
valamint a vesszőket elhagyva képleteink valamelyest összezsugorodnak:
| (10 ab) |
Ne = ₣(γc+αs) + δec + βes
Nh = ₣(–γc–αs) + δhc + βhs
|
és (11ab) |
Ke = ₣(–γs+αc) + βec – δes
Kh = ₣(γs–αc) + βhc – δhs
|
A rövidség kedvéért sinη-t s-sel, cosη-t c-vel jelöltük, és a továbbiakban fontos szerephez jutó Fe+Fh fékerőösszeget ₣-fel. Vegyük észre, hogy kerékpár esetén ezeken kívül még
| (12)
|
|
is teljesül a (3) egyenlet miatt. |
A megcsúszásra jellemző (Fe,Fh) fékkombinációkat most is a tapadási súrlódás szokásos képletével keressük, de mivel a kerekek alatt két merőleges erőfajta is részt követel az elméleti maximális tapadási erőből, az első illetve hátsó csúszásvonalakat rendre a
| (13ab) |
Ke2 + Fe2 ≤ (μNe)2,
Kh2 + Fh2 ≤ (μNh)2
|
egyenlőtlenségek (határesetben egyenletek) megoldásával próbáljuk megkapni.
A bukást külön nem tárgyaljuk, mert feltételezzük, hogy ugyanúgy adódik a csúszásvonalaknak egy kritikus első fékerőn túli teljes elfogyásából, mint azt az előző pontban láttuk. Külön meg kell vizsgálni, hogy kizárhatók-e egyszerű matematikai eszközökkel azok a biztonságosnak látszó fékkombinációk, amelyek a negatív elméleti nyomóerők négyzetreemelésekor keletkeznek. A függőleges síkban felírt forgatónyomatéki egyenlet ugyanis negatív nyomóerőket is szolgáltathat. Most csak remélni tudjuk (a leírt fizikai valóság ésszerű voltára és modellünk megbízhatóságára támaszkodva), hogy az eredményül kapott képletek és grafikonok maguktól kiszűrik a rossz kombinációkat.
Még egy fontos megjegyzés kívánkozik a bizonyítás elé. A következő levezetésekben a polinomok határozatlanja (₣) formális szimbólum, tehát nem feltétlenül kell rajta egy valódi, balesetmentes haladási-fékezési állapothoz tartozó fékerőösszeget érteni. Látni fogjuk, hogy a csúszásvonalak koordinátái ₣-nek mint változónak (lényegében) egyértékű függvényei. Ennek érdekében elviseljük azt a fizikai szempontból zavaró körülményt, hogy az ₣ függvényében megkapott első és hátsó csúszásvonalak Fe,krit ill. Fh,krit koordinátáinak összege nem feltétlenül ₣. Erről bővebben a maga helyén szólunk.
(10), (11) és (13) összevetésével a következő másodfokú függvények adódnak a csúszásvonalakra:
(14ab) F2e,krit = A₣ + Be₣ + Ce és F2h,krit = A₣ + Bh₣ + Ch, ahol
A = μ2(γc+αs) – (γs–αc)2
Be = +2[μ2(αs+γc)(βeb+δec) – (αc–γs)(βec–δes)]
Bh = +2[μ2(αs+γc)(βhb+δhc) – (αc–γs)(βhc–δhs)]
Ce = μ2(βes+δec)2 – (βec–δes)2
Ch = μ2(βhs+δhc)2 – (βhc–δhs)2
Az Fe,krit(₣) és Fh,krit(₣) függvényeket úgy ábrázolhatjuk az (Fe,Fh) grafikonon, hogy egy ₣* értékhez kiszámoljuk F2h,krit értékét; ha ez nemnegatív, akkor gyökét és gyökének ellentettjét az ábra szerint hozzárendeljük ₣*-hoz, ha pedig negatív, akkor pedig nem veszünk fel pontot. Az első kritikus fékerőt ugyanígy ábrázoljuk, csak a másik tengelyen. Programozni úgy lehet az ábrázolást, hogy a kiszámolt első kritikus fékerő (illetve az ellentettje) lesz az első koordináta, és ezt ₣*-ból kivonva kapjuk a másik koordinátát.

Vállalkozásunk nagy előnye, hogy nemcsak a fékezést, hanem a hajtást is tárgyalhatjuk vele, amelyet negatív hátsó "fékerő" jellemez. Ezentúl tehát a teljes grafikonsíkot figyeljük, azaz negatív fékerőösszegekre is felkészülünk.
A gépkocsit a φ = η kikötéssel származtathatjuk, és rá is igazak a (12) képlet felhasználása nélkül kapott (14ab) egyenletek. Később látni fogjuk, hogy ez a származtatás többet ad az autónak, mint a gyártók – azaz feltételez néhány berendezést, ami nincs meg a kocsiban.
A számítógépes ábrázolás (1. melléklet) szerint a kerékpár csúszásvonalai egyenesek, a gépkocsiéi nem; sőt látható, hogy a kerékpár kanyarban olyan ₣-ekre is állva marad (ez a (14ab) képletek [0,₣] intervallumon való együttes pozitivitását jelenti), amelyekre az autó megcsúszik (ez onnan látszik, hogy valamelyik, (14ab) szerinti kritikus fékerőnégyzete abban a pontban nullává válik, tehát valamelyik kerék alól elfogy a fékerőtartalék).
Ez a tapasztalat mindenképpen magyarázatra szorul, mert ha igaz, akkor a kerékpár "jobb" jármű, mint az autó, hiszen jobban bírja a kanyarban történő fékezést, mint amaz. De a (14ab) polinomokból lehetetlenség formálisan gyököt vonni, mivel ha volna gyökpolinomjuk, akkor semmiféle tapadási, lejtő,- kanyar- és sebességviszonyok közt nem adhatnának negatív értéket. Ez még akkor is így van, ha számolásainkat a (12) képlettel is megfejeljük, és így próbálunk formális gyököt keresni.
A nehézségek akkor hárulnak el, ha ábrázoljuk pl. F2h,krit -et ₣ függvényében. Azt tapasztaljuk, hogy kerékpárhoz egy, autóhoz két zérushelyű parabolák tartoznak. Ezen belül találhatók olyan út- és haladási viszonyok (α, β, γ, δ), hogy a kerékpár parabolái lefelé nyílnak, azaz a bicikli fékezés nélkül is megcsúszik. Jó volna ezeket a paramétereket precízen is megkapni.
A számítógépes ábrázolás matematikailag is ellenőrizhető: fél oldalas levezetés után, amelyben felhasználjuk a (12) kerékpárspecifikus képletet is, kijön, hogy a (14a) és (14b) polinomok diszkriminánsa minden α, β, γ, δ paraméter esetén nulla, azaz ha a polinom valódi másodfokú, akkor pontosan egy zérushelye van. Hasonló hosszúságú számolással az is bebizonyítható, hogy ha A = 0, akkor Ce ill. Ch is nulla. A kerékpár esetén mindig igaz B2e/h = 4ACe/h azonossággal összevetve ebből az következik, hogy a (14ab) parabolák együtt nyílnak felfelé, együtt lefelé, és együtt azonosan nullák. Ezt a szép harmóniát az autó parabolái (amelyek, mint látni fogjuk, minden paraméter esetén felfelé nyílnak, tengelypontjaik azonban felfelé és lefelé is vándorolnak, az úttól és a haladástól függően) nem tudják produkálni: az első és a hátsó kerekek alól nem ugyanakkor fogy el a tapadási erőtartalék.
A biciklire vonatkozó parabolákból, mint láttuk, nem lehet gyököt vonni, így a csúszásvonalak metszéspontjához tartozó ₣ fékerőösszeget (amely csak ez esetben lesz két valóságos erő összege) más úton kell előteremtenünk. Ennek egy lehetséges módja az, ami a jelen dolgozatot olvashatatlanná tenné: hosszú levezetés, sok kitérővel. Ehelyett egy csinos mértani bizonyítást adunk, amely teljesen egyenértékű vele.
Először vegyük észre, hogy a (9) transzformáció előtti kényszererőkre minden ₣ esetén igaz a következő aránypár:
Ennek bizonyítása érdekében a (7-8) képletekből beírjuk az erőket, majd felhasználjuk a (12) egyenletet:
|
= |
|
|
= tgφ |
Ugyanez adódik az aránypár másik oldalára. |
Tehát a transzformálatlan mennyiségekből képzett
vektorok lineárisan összefüggők.
A (9) bázistranszformáció lineáris, ezért az eredményül kapott erők alkotta vektorok is összefüggők. Így az aránypár a transzformált kényszererőkre is teljesül.
Ezek után kimondjuk a következő tételt:
Ha egy lapos kétkerekű jármű kerekei között a nyomóerők és az oldalra húzó erők arányait vizsgáljuk, akkor abban az esetben lehet a pontmodell által megengedett maximális
fékerőt kimeríteni alkalmas fékkombinációval, ha a kétféle kényszererő egyenlő arányban oszlik el a két kerék között.
Bizonyításul tekintsük a következő szemléltető ábrát, amelyen a ferde vonalak jelentik a nyomóerők μ-szörösét, a vízszintesek az oldalerőket, végül a függőlegesek a fékerőket.

|
Vegyünk egy adott hosszúságú kötelet. Ez jelképezi μN-et. Rögzítsük az oldalerők arányát egy függőleges osztóvonallal. Ha a nyomóerők ugyanilyen arányban oszlanak el, akkor a kötelet a cövektől a falig 3 szerint feszítsük ki, ha pedig nem, akkor 1, 2 vagy 4 szerint.
(13ab) miatt a kerekek alatti maximális fékerők a kötélszakaszok emelkedéseivel egyenlők. A fékerőösszeget pedig a kötél végének magassága jelzi; és ez nyilván a 3 szerinti kifeszítés esetén a legnagyobb.
|
A biciklire az aránypár miatt a 3 szerinti kifeszítés érvényes, ezért (a bukás esetét kivéve) mindig kinyerhető belőle a maximális fékerőösszeg: (μN)2 – K2 gyöke. Ha a kerékpár "lapos" (pl. tandem), akkor országúti körülmények között soha nem borul fel. Ezzel a tételt beláttuk. Ugyanerre vezetne az algebrai bizonyítás, amely még a Függelékből is kimaradt.
Kiegészítésként hozzá lehet tenni, hogy gépkocsira a gravitáció – oldalerő viszonyra való tekintet nélkül φ = η, tehát nem feltétlenül igaz (12). Emiatt a hozzá tartozó kötélkifeszítés biztosan megtörik, azaz a csúszásvonalak legnagyobb ₣-hez tartozó pontja "beljebb" lesz az (Fe,Fh) grafikonon, mint a kerékpárt ugyanilyen módon jellemző pont. Tehát a bukást leszámítva a kerékpár tényleg tökéletesebb az autónál.
Azzal az élesítéssel dolgoztunk, hogy a kocsi kerekei "külön-külön" fékezhetők. E feltevésre ugyanis szükség van, ha az autóból olyan biciklit akarunk gyártani, amely belefér a modellbe. Konkrétan arról van szó, hogy az autó tengelyeit kerekekké sűrítettük, és őket használtuk a modellben. A sűrítés során azt az előnyt adtuk az autónak, hogy bár kanyarodáskor a nyomóerők aránya az ugyanazon tengelyen lévő kerekek között is eltolódik, az oldalerők eloszlása (amely a merev kapcsolat miatt elvileg határozatlan) és a fékerőeloszlás (amelyet a kényelem kedvéért a bal és a jobb oldal közt tudatosan szabályozhatónak képzelünk) kezeskedik arról, hogy az egyes tengelyekből kihozható az a fékerő, ami a helyükre tett kerekekből kihozható. A sűrítés után kaptunk egy olyan "biciklit", amelyet erős kényszer tart az úttestre merőleges síkban (ezzel vettük figyelembe az autó oldalradőlési stabilitását).
Ami mármost a kerékpár bukását illeti, róla az első részben megmutattuk, hogy az Fe = mgb/h esetén következik be, ahol egyébként a különböző μ-khöz tartozó hátsó csúszásvonalak összefutnak. Itt a kivehető hátsó fékerő nulla, mégpedig azért, mert a hátsó nyomóerő is az. Ezt a tényt úgy általánosíthatjuk, hogy bebizonyítjuk: minden μ-re a hozzá tartozó hátsó parabola tengelypontjának első koordinátája mgbcosθ/hcosφ.
Tényleg, mivel a Viète-formula fele éppen a tengelypontot adja meg, elég belátni, hogy Bh/2A = mgbcosθ/hcosφ. A formális osztás persze kilátástalan, de az átszorzott alak a (12) képlet és az mgbcosθ/hcosφ = δh/γ helyettesítés segítségével azonosságnak bizonyul. Vagyis a kerékpárnak parabolából származtatott csúszásvonalai (amelyekről a diszkrimináns eltűnése miatt tudjuk, hogy tényleg egyenesek) rögzített lejtés és haladás mellett minden μ-re az általánosított bukfencpontban találkoznak.
A fenti rögzítés azonban természetellenes: általában a tapadási együttható az, ami állandó, a lejtés, a kanyar görbülete és a sebesség pedig rendszerint változik az út során. Rögzített tapadási tényező, kanyargörbület, lejtő- és oldalszög esetén még lehet valóságízűen ábrázolni a csúszásvonalakat; az 1. melléklet a szabványkerékpárra, illetve vele egyező geometriájú "autóra" számított csúszásvonalakat mutatja néhány esetben.
Egy további érdekes megfigyelés tehető, ha közelebbről is megvizsgáljuk, hogy a másodfokú kifejezésekben szereplő A szám milyen út- és mozgási viszonyok esetén válik nullává. Erre az eredményre azért is szükség van, mert még nem sikerült a csúszásvonalakat minden paraméterre szemléletesen jellemezni. Ez a terv csak a Függelékben valósul meg.
Nos, ha A = μ2(γc+αs)2 – (γs–αc)2 ≥ 0, akkor ebből a p = tgη, t = tgφ rövidítésekkel a
μ|γc+αs| ≥ |γs–αc| → μγ|c+ts| ≥ γ|s–tc| → μc|1+tp| ≥ c|p–t|, azaz
összefüggés adódik. A tangensre vonatkozó addíciós tétel segítségével ez a következő alakot ölti:
Ennek egyszerű geometriai jelentése van: nem szabad túlságosan megdönteni a kerékpárt az oldallejtés szögéhez képest; azaz mivel a bicikli dőlését adott kanyarban csak a sebesség szabja meg, egy bizonyos sebességintervallumban kell maradni. Meggyőző, hogy oldalra nem lejtő terepen ez a képlet átmegy a μ ≥ tgφ speciális alakba, amely (12) miatt a μmgcosθ ≥ mv2/R ↔ μN ≥ K feltétellel egyenértékű.
Természetesen csak szükséges feltételt kaptunk, mert nyilván nem szabad a vízszintes alá dőlni – az azonban biztos, hogy egy tapadós, szinte függőleges falú "kádban" egészen a vízszintesig való dőlést engedélyez az A ≥ 0 feltétel. Azaz ilyen pályán a sebességet felülről nem korlátozza semmi. Alulról azonban igen: kis sebesség vagy hegynek felfelé való kanyar esetén lehetséges a lecsúszás a teknő aljára. LÁSZLÓ Gergely mutatott a szerzőnek egy olyan videofelvételt, amelyen egy vigyázatlan pályaversenyző jutott erre a sorsra, amikor hegynek felfelé akart vetélytársa fölé kanyarodni (ekkor taktikai okokból lassan haladtak).
Egy másik észrevétel, hogy az A = 0 feltételnek a dőlésszögre vonatkozó következménye független (12)-nek (3) miatt felhasznált jobb oldalától, így kocsira is érvényes. Az autó fékezési parabolái eszerint és a φ = η megkötés (azaz A állandósága) miatt mindig felfelé nyílnak, alakjuk is állandó, de tengelypontjuk a zérus alá süllyedhet, ezért az autó a kerékpárt nem tudja túlszárnyalni a kanyarodás közbeni fékezésben. Hogy a dőlési képesség az oka a kerékpár fölényének, azt az is mutatja, hogy némelyik autócsodán már található olyan rugózat, amely kanyarban befelé dőlést (azaz bicikliszerűséget) hoz létre azáltal, hogy a kanyarkülső "légrugót" felkeményíti (Citroën Xantia).
FÜGGELÉK
I. Az egyenes pályán való fékezéskor a csúszásvonalak metszéspontjáról megmutattuk, hogy összfékereje éppen μmg. Érdemes a metszéspontot mint μ paraméterű görbét tekinteni, mert még ennek is van szemléletes jelentése. Amíg ugyanis a kerékpáros optimálisan fékez, ezt a görbét követi változatos útviszonyok között.
Jelöljük Fe,opt-t x-szel, Fh,opt-t y-nal. A paraméteres görbét az I. főrész alapján az
képlet jellemzi.
Ha ebből sikerül kiküszöbölni μ-t, akkor meglesz a görbe koordinátageometriai egyenlete. Ennek érdekében először képezzük a koordináták hányadosának ellentettjét:
Ebből hosszadalmas, de egyszerű átalakítással
következik.
Az x és y mennyiségek között fennáll még az x + y = μmg egyenlet is, amely az előzőtől független. Ebbe behelyettesítjük μ fenti kifejezését:
| x + y = mg |
( |
|
+ |
|
|
) |
, azaz (x+y)2 = |
|
|
(x+y) – |
|
|
y |
Itt már látszik, hogy ferde kúpszelettel van dolgunk, mert xy-os tag van benne. Az utolsó tag azonos átalakításával az egyenlet az
| (x+y)2 = |
|
|
(x+y) – |
|
|
(x+y) + |
|
|
(x–y) |
alakot ölti.
Az u = x + y, v = x – y új változókra áttérve:
Ez az (u;v) koordináta-rendszerben parabola egyenlete; e rendszer abszcisszatengelye (u) 45º-ban, ordinátatengelye pedig 135º-ban áll. A parabola zérushelye egyrészt az origó, ahol (u;v) = (0;0) = (x;y), másrészt az u = mg(2b–l)/2h pont. Ez azt jelenti, hogy a parabola tengelye nem feltétlenül megy át az origón – csak ha 2b = l, azaz a bicikli középen van terhelve.

|
Nagyon csúszós úton (az origó közelében), és ha a biciklit hátul terheltük, a parabola az u tengely fölött lép be a kétszer pozitív síknegyedbe, – azaz ilyen viszonyok közt részarányosan nagyobb szerepet kap a hátsó fék (y koordináta) az optimális fékezésben. És minél hátrébb van a súlypont, annál nagyobb lesz a bukfenclassulás tapadós úton – a parabola később bukik le az x tengely alá. |
Megvizsgálhatjuk még a parabola (x;y) rendszerbeli maximumát, amely azt a legnagyobb hátsó fékerőt jelenti, amelyet egy mindig optimálisan fékező biciklista egész életében, változatos terepeken kifejthet. Ehhez a parabola u szerinti deriváltját 1-gyel tesszük egyenlővé, ugyanis a vízszintes egyenesnek az (u;v) rendszerben ez a meredeksége.
|
= |
|
|
+ |
|
|
= |
|
|
+ 1 – |
|
|
= 1, ahonnan rendezés után u* = |
|
|
Mivel u jelentése x+y és x* + y* = μ*mg, azt kapjuk, hogy a hátsó féket optimális esetben leginkább igénybe vevő fékkombináció b/2h nagyságú tapadási tényezőhöz tartozik, azaz pontosan a bukfencet lehetővé tevő legkisebb μ feléhez. A görbét paraméterező szám ezen speciális értéke
| F*e = |
|
|
(μ*h+l–b) = mg |
|
( |
|
h+l–b |
) |
= mg |
|
(2l–b) ≈ |
|
mg első és |
| F*h = |
|
|
(b–μ*h) = mg
|
|
( |
b– |
|
h |
) |
= mg |
|
≈ |
|
|
mg hátsó fékerőt szolgáltat. |
Az utóbbi eredmény figyelemreméltó: azt mutatja, hogy elvileg soha nem kellene tövig húzni a hátsó féket. Itt azonban tekintettel kell lenni arra, hogy a kerékpárosok a való életben előforduló fékezéseknél inkább biztonságra törekszenek, mint a legnagyobb lassulás kigyötrésére; és hogy ösztönösen is egyenlő erőkkel fékeznek. LÁSZLÓ Gergely nyomán megjegyezzük, hogy ez országúti versenyzők körében is előfordul úgy, hogy a fékezés következő pillanatában elengedik a hátsót. Ehhez a stratégiához csak azt a magyarázatot fűzhetjük, hogy az első pillanatban a kerékpáros felsőteste egy kicsit előrelódulhat, és emiatt nőhet a rendelkezésre álló hátsó nyomóerő. Ez az effektus azonban eléggé jelentéktelen, és nem is valószínű, hogy tudatosítása bármilyen szerepet játszana a fékkombináció megválasztásakor. Inkább az a tapasztalat állhat a háttérben, hogy a hátsó kerék a fékkar goromba megrántása után nem rögtön, hanem kis késéssel blokkol le – ami a fenti jelenség mellett annak következménye, hogy ruganyossága miatt a fékrendszer fáziskéséssel működik.
A kerékpárosok fékezési stratégiái közül megemlíthetjük az ún. pumpáló fékezést hosszú lejtőn. Ennek nem az imént tárgyalt jelenséghez van köze, hanem elősorban ahhoz, hogy némelyek így igyekeznek az esővizet kiszorítani a fékpofa és az abroncs közül. Mások azért alkalmazzák, mert szerintük így kisebb a fékgumi meglágyulásának a veszélye. Dr. NAGY Sándor ([1], 117. o.) nem tartja reálisnak ezt a stratégiát, és hosszú lejtőn egyenletesen elosztott, állandó fékezést javasol, szükség esetén megállásokkal. Ehhez azt tehetjük hozzá, hogy a fentihez hasonló ideológiák valószínűleg a "lejtőláz" velejárói, azaz hogy senkinek nincs ínyére a fenséges lefelé suhanást holmi földhözragadt biztonsági okból megszakítani.
A következő megjegyzés a kanyarodásos részhez kapcsolódik.
II. Bebizonyítjuk, hogy
B2e/h = 4ACe/h. Emlékeztetőül:
A = μ2(γc+αs) – (γs–αc)2
Be = +2[μ2(αs+γc)(βeb+δec) – (αc–γs)(βec–δes)]
Bh = +2[μ2(αs+γc)(βhb+δhc) – (αc–γs)(βhc–δhs)]
Ce = μ2(βes+δec)2 – (βec–δes)2
Ch = μ2(βhs+δhc)2 – (βhc–δhs)2
Felhasználhatjuk az αδe/h = γβe/h azonosságot.
Elég B2 = 4AC-t megmutatni, mivel Be és Bh csak előjelben és indexben tér el, Ce és Ch pedig csak indexben, és a segédazonosság is indexfüggetlen. A továbbiakban tehát az indexet elhagyjuk. Felírjuk a bizonyítandó egyenlet két oldalát μ hatványai szerint bontva. Formális egyenlőséget várunk, ezért minden tagban egyenlőségnek kell fennállnia.
B2/4 =
μ4·(αs+γc)2(βs+δc)2
–2μ2·(αs+γc)(βs+δc)(αc–γs)(βc–δs)
+1·(αc–γs)2(βc–δs)2
|
AC =
μ4·(αs+γc)2(βs+δc)2
–μ2·[(αs+γc)2(βc–δs)2 + (αc–γs)2(βs+δc)2]
+1·(αc–γs)2(βc–δs)2
|
Csak a második sorbeli kifejezések egyenlősége szorul bizonyításra. Csoportosítsuk itt μ2 együtthatójának ellentettjét s és c kifejezései szerint mindkét oldalon:
|
s4:
s3c:
sc2:
sc3:
c4: |
|
2αβγδ
2βδγ2 + 2αγδ2 – 2α2βδ – 2αβ2δ
2α2β2 – 4αβγδ – 2α2δ2 – 2β2γ2 + 2γ2δ2
2α2βγ + 2αβ2γ – 2βγ2δ – 2αγδ2
2αβγδ
|
|
α2δ2 + β2γ2
2αγδ2 – 2α2βδ + 2βγ2δ – 2αβ2γ
α2β2 + γ2δ2 – 4αβγδ + α2β2 + γ2δ2 – 4αβγδ
2αβ2γ – 2βγ2δ – 2αγδ2 + 2α2βγ
β2γ2 + α2δ2
|
Az azonosan színezett tagok a (12)-ből adódó αδ = βγ miatt egyenlőek. Fennáll tehát a kívánt B2 = 4AC egyenlőség. Ezért A=0 esetén B is nulla.
III. Ezután azt látjuk be, hogy ha A=0, akkor C is nulla. Ehhez felhasználjuk azt a (főrészben bizonyított) tételt, hogy ha A=0, akkor μ = |p–t|/(1+tp). (Ez a túldőlési határeset, ahol fékezés nélkül is borulás következik be.) Emlékeztetőül a korábban használt definíciós képletek: p = tgη = s/c és t = tgφ = β/δ, innen β= tδ és s = pc. Felírva C-t:
| C = μ2(βs+δc)2 – (βc–δs)2 = |
|
|
(tpδc+δc)2 – (tδc–pδc)2 =
|
| = δ2c2
|
( |
|
(tp+1)2 – (t–p)2
|
) |
= 0 |
Ebből következik az a megnyugtató tény, hogy a kritikus fékerők négyzetei az ₣ paramétertől úgy függnek, hogy a hozzárendelés vagy teljes négyzet, vagy teljes négyzet ellentettje, vagy azonosan nulla. Ez a felosztás a dőlési (azaz a kanyarodási és sebesség-) viszonyokat jellemzi. A balesetmentes eset ezek közül az legelső, emellett az első és hátsó kritikus fékerőnégyzet zérushelyei között kell lennie a kifejtett összfékerőnek, mert a végtelen fékerőösszeg határesetében a hátsó nyomóerő négyzete mögött negatív nyomóerő áll. Tehát a katasztrófamentes rész a végesben van. Ezt a tartományt tovább szűkíti az a tény, hogy ha egy bizonyos fékkombinációt az első csúszásvonal megenged, azt a hátsó nem feltétlenül – csakúgy, mint a kanyarmentes esetben.
IV. Mivel a parabola tengelypontját a B/2A képlet adja meg, megvizsgálhatjuk a billenési helyeket. Bebizonyítjuk, hogy Bh/2A = mgbcosθ/hcosφ, azaz a bukfencpontra jellemző erő a kanyar nélküli esetből természetes általánosítással származtatható. Segítségünkre van az
mgbcosθ/hcosφ = δh/γ helyettesítés. Mivel ezt és a bevált αδ = βγ egyenlőséget nem lehet használni a Bh/2A formális polinomosztás közben, az átszorzott alakot vizsgáljuk.
[μ2(αs+γc)2 – (γs–αc)2]·δh = [μ2(αs+γc)(βhs+δhc) – (αc–γs)(βhc–δhs)]·γ
A két oldalt s és c kifejezései szerint rendezve (indexek nélkül):
s2:
sc:
c2: |
|
μ2α2δ – γ2δ
2μ2αγδ + 2αγδ
μ2γ2δ – α2δ
|
|
μ2αβγ – γ2δ
μ2αγδ + μ2βγ2 + αγδ + βγ2
μ2γ2δ – αβγ
|
Az azonosan jelölt tagok αδ = βγ miatt egyenlők. Tehát fennáll a bizonyítandó állítás. Figyelembevéve, hogy Be Bh-ból indexcserével és –1 szorzóval adódik, hasonló gondolatmenettel belátható, hogy Be/2A = –mgccosθ/hcosφ, azaz gccosθ/hcosφ pályairányú gyorsulás esetén a bicikli felágaskodik. Ennek természetesen csak motorkerékpár esetében van gyakorlati jelentősége, és csak kellően tapadós talajon.
Most már van szemléletes képünk a csúszásvonalakról a kanyarodásos esetben is. Egyeneseket kaptunk (teljes négyzet gyökeként), amelyek az első csúszásvonalak esetén a függőleges, hátsók esetén a vízszintes erőtengely egy pontjában találkoznak. Túl erős kanyar esetén a csúszásvonalak "összecsukódnak", azaz eltűnnek a valós koordinátasíkról. Az 1. mellékletben néhány csúszásvonal számítógépes ábrázolását láthatjuk, a paraméterekkel.
V. Az autó csúszásvonalai a
φ = η megfeleltetés miatt nem egyenesek. Azt azonban nem igazoltuk, hogy ez az eljárás jogos. Elvégre ahogy a bicikli egy alkalmasan választott fékkombinációval "utolérte" a pontmodellt a fékezési hatékonyságban, úgy lehetséges, hogy az autó (négy kerekét külön-külön fékezve) olyan biciklivé "lapítható", amely a kanyarnak megfelelően "bedől." Valahogy úgy, hogy a tengelyek helyébe képzelt biciklikerekek nem középen (a tömegközéppont alatt) vannak, hanem a kanyart tekintve kijjebb. Most belátjuk, hogy ez nem így van, vagyis az autó még négy fékkel se tudna "bedőlni."
A forgatónyomatéki egyenletből indulunk ki, amelyben a kocsi tehetetlenségi nyomatékának és szöggyorsulásának szorzatát nullának vesszük. Ez persze koránt sincs így, de a közelítés csak kedvez az autónak a csúszás dolgában. További idealizáció: a tömegközéppont a kerekek alkotta téglalap közepén van, légellenállás nincs, és a talaj csak oldalra lejt. E két utóbbi megkötés egyébként kiküszöbölhető volna, de itt nem az ilyen részletkérdésekre kívánunk összpontosítani, hanem a nyomó- és az oldalerők eloszlására.
|

|
Berajzoltuk a V tengelyerőket, az F fékerő-egyenértékeseket, a nyomóerőket, az oldalerőket és az inerciaerőket. Ezek definíció szerint függőlegesek ill. vízszintesek. Az első ábrán a felülről mutatott kocsi bedöntött balkanyarban halad, lejtés nincs, ezért lehet "rálátni" a kerekekre. A dőlés szöge egyenlő az oldallejtés η szögével; ezt az egyenletben (forgatónyomatéki egyensúly a téglalap középpontján átmenő függőleges tengely körül) az erőkarok transzformációja jelzi. A második ábra az ugyanezen ponton átmenő vízszintes tengely körüli forgatónyomatékok eredőjéről szól. Ez alapján írjuk fel a következő egyenletet:
| (Fbe+Fbh) |
( |
rcosη– |
|
sinη |
) |
+ (Fje+Fjh) |
( |
rcosη+ |
|
sinη |
) |
+ |
|
| |
+ (Nbh+Njh–Nbe–Nje) |
|
+ mahcosη + (Vbh+Vbe–Vjh–Vje) |
|
sinη = 0 |
A V-vel jelölt erők, amelyek a tengelyt nyomják hátrafelé, megközelítőleg egyenlők a fékerőkkel. Ez a képletet jócskán leegyszerűsíti. A bal-jobb oldal szerinti bontást meg lehet szüntetni. Egyszerűsítés és a szokásos s = sinη, c = cosη rövidítés után:
| Frc + (Nh–Ne) |
|
+ ma(h–r)c = 0 |
| Mivel F = ma, ebből |
|
= F |
|
c következik. Másrészt Ne+Nh = mg, így |
A bal oldali ábra nyomán felírt egyenlet:
| (Kbe+Kje–Kbh–Kjh) |
|
+ (Fje+Fjh)
|
( |
|
c–rs |
) |
– (Fbe+Fbh) |
( |
|
c+rs |
) |
+ |
|
| |
+ (Vbe+Vbh) |
|
c – (Vje+Vjh) |
|
c – ma(h–r)s = 0
|
Az erők bontását részben feloldva:
| (Ke–Kh) |
|
– Fjrs – Fbrs – ma(h–r)s = 0, azaz (Ke–Kh) |
|
– Fhs = 0
|
| Az ebből kapott |
|
= F |
|
s egyenletet a |
|
= |
|
|
összefüggéssel egybevetve: |
A négy kiemelt képlet teljesen ugyanolyan, mint egy η szögben dőlő bicikli képletei. Ez indokolja, hogy az autót a φ = η értékadással származtassuk. Erre nem feltétlenül teljesül az Ne/Nh = Ke/Kh aránypár, ami tudvalevőleg szükséges feltétele annak, hogy a jármű felvegye a versenyt a pontszerű fékező objektummal (pl. kisegér a labdában). Az aránypár átszorzott alakjába ugyanis beírhatjuk a nyomó- és az oldalerőket:
KeNh = KhNe
| ( |
|
+ F |
|
c |
)( |
|
– F |
|
s |
) |
= |
|
( |
|
– F |
|
c |
)( |
|
+ F |
|
s |
) |
A bal oldal csak az úttól függ, a jobb oldal pedig a sebességtől is. Tehát szó sem lehet arról, hogy minden mozgás- és fékezésállapotban fennállna az aránypár, ellenkezőleg: csak olyanokban, amelyek természetes dőlése egyenlő az út oldallejtésével. Ezért van sok országúti kanyar "bedöntve" (jellegzetes példa a 2-es út Vác és Rétság között), és ezért készítették az új Citroënt légrugósra: amint láttuk, ennek a kényelmi szemponton kívül jelentős biztonságnövelő hatása is van.
VI. Még egy érdekességet említenénk a kanyarodás és fékezés kérdésköréből. Mivel explicit képletet kaptunk a maximális biztonságos lassulásra és általában a biztonságos haladásra az úttest (vagy a Millenáris) egy pontján, a sebesség és a kanyar ívének ismeretében, lehetségessé vált, hogy konkrét utakat is megvizsgáljunk. Ezt egy számítógépes program végzi, amely felülnézetben és látszati képben is kirajzol egy (lejtős) kanyart. A felhasználó egérrel beadhatja az általa választott útvonal néhány pontját. A gép ezekre köztes pontok sorozatos felvételével sima görbét illeszt. Ezután megvizsgálja az így kapott pálya pontjait, lejtést és oldallejtést számol, meghatározza a pálya vízszintes és függőleges görbületét, stb.
Ezután az adott pontban ciklust kezd a sebesség szerint, amelyben kiszámítja a maximális biztonságos fékerőt. (A pontokon végighaladva az út szerint végez ciklust.) Végül egy lassulásokból álló halmazt kap, amelyet az út és a sebesség mint index rendez mátrixszá. A maximális fékezési lassulásokat a szuperpozíció elvével hozzáadja a helyre jellemző lejtési gyorsulás és a sebességre jellemző közegellenállási lassulás eredőjéhez. Ebből az általános
összefüggés segítségével elkészíti a pálya fázisterét, amelyen képernyőre vagy (a Grapher programmal) papírra való kiírás után látszanak az adott pályaválasztáson belüli különböző sebességmenetek. Hasonló eljárással egy-egy fázisteret rendel a puszta guruláshoz és a maximális hajtáshoz is. (Ez utóbbit a kerékpáros izomteljesítményének maximálásával állítja elő.) A három fázistér egymásraírásával teljessé válik a választott pálya jellemzése. Látszik, hogy egy kanyart a kisodródás veszélye nélkül legfeljebb mekkora sebességgel lehet bevenni. Leolvasható az is, hogy legalább mekkora sebesség kell, hogy az adott útvonalról le ne csússzunk az esetleges teknő mélyébe. Ilyenformán felvázolhatók a biztonságos sebességmenetek a pályán. Mivel pedig a végigjárási időt az
integrál adja meg, megkereshető az adott pálya leggyorsabb biztonságos bejárása is. Sajnos a szerzőnek nem sikerült ezt a vizsgálódást tovább általánosítania abban az irányban, hogy ne csak egy választott pályát elemezzünk, hanem egy valódi útkanyar összes lehetséges bevételét – nemcsak gyorsasági, hanem biztonsági szempontból is. Ha sikerülne (ez nehéz eszközöket, leginkább funkcionálanalízist igényelne), akkor lehetségessé válnék a kanyarválasztás ösztönös elemeinek magyarázata és a modell hiányosságainak kiküszöbölése is.
VII. A kanyarodás-fékezés itt használt modellje, el kell ismernünk, elég tökéletlen.
Hiányosságai közé tartozik a tehetetlenségi nyomaték elhanyagolása, ami autó esetében szembeszökően durva közelítés. A szöggyorsulás azonban olyan tagot hozna be a számítógépes algoritmusba, amely nem sebesség-, hanem gyorsulásfüggő (is), ilyenformán nem ábrázolható fázistérben. A tervezett mélyebb elméleti vizsgálatba ezt is bele lehetne venni, de a csúszásvonalak egyenletei megváltoznának.
További elhanyagolás volt az egy tömegponttá való sűrítés, holott a kerékpáros felsőteste jelentősen mozoghat a járműhöz képest. Itt nehéz volna továbbhaladni, mivel a két test közti erő természetéhez kevés támpontunk van – a kölcsönhatást talán lengéscsillapítóhoz lehetne hasonlítani.
A tapadási együttható sebesség- és dőlésszögfüggése aránylag könnyen kiküszöbölhető probléma. Ennek összefüggésében válhat érdekessé a kerékpárosok eltérő kanyartechnikája is: van, aki kiteszi a térdét, és egyenesben tartja a kerékpárt; mások erősebben is bedőlnek azáltal, hogy függőlegesen tartják a törzsüket.
Felhasznált irodalom
[1] Saját ismereteimen kívül leginkább a Dr. NAGY Sándor által írt, fizikai vonatkozásokban bővelkedő, Kerékpárosok könyve című művet használtam. (Sport, Budapest, 1988.) Az átvétel főleg háttérinformációkból állt: mit szoktak, mit nem szoktak csinálni a kerékpáros turisták és versenyzők, milyen baleseti lehetőségek vannak, mi lehet bizonyos szokások mögött, stb.
[2] Elolvastam egy igen érdekes Internet-cikket is, amelyet a Mike Iglesias által kezelt kerékpáros FAQ-ban (tanácsgyűjteményben) találtam, amely a rec.bicycles.misc rovatban jelent meg. A cikk száma 9.17, szerzője egy tengerentúlon ismert szakember, John FORESTER. Ez kétoldalas terjedelme miatt elsősorban a téma összegzésére volt szánva. Érdekes megjegyzéseket, szokásokat és közkeletű babonák leírását találtam benne, egy jó szándékú és hozzáértő ember tollából.
Köszönetnyilvánítás
Külön szeretnék köszönetet mondani Dr. Tokodi Jenőnek a BME Közlekedésüzemi Tanszékéről, aki hosszú levélben hívta fel figyelmemet a modell továbbfejlesztési lehetőségeire; László Gergelynek és Bencének a versenyzői stratégiák és fogások készséges ismertetéséért; Dr. Nagy Sándornak, Illés Bálint kerékpáros szakedzőnek és témavezetőmnek, Juhász Andrásnak azért, hogy a megfelelő helyre irányítottak.
Mellékletek
1. melléklet
A) Autó csúszásvonalai
Pályasugár: 20 méter
Oldallejtés: 5 fok
Tapadási együttható: 0,6
A sebesség negyedikgyök-függvény szerint nő.
A fékerők önkényes mértékegységben vannak ábrázolva.

B) Bicikli csúszásvonalai
Pályasugár: 20 méter
Oldallejtés: 5 fok
Tapadási együttható: 0,6
A sebesség negyedikgyök-függvény szerint nő.
A fékerők önkényes mértékegységben vannak ábrázolva.

2. melléklet
S-kanyar fázistere
(Kanyar a völgy felé, majd a hegy felé)
Felső iránytüske: szabad gurulás
Alsó iránytüske: maximális fékezés
Az út és a sebesség önkényes mértékegységben van ábrázolva.
